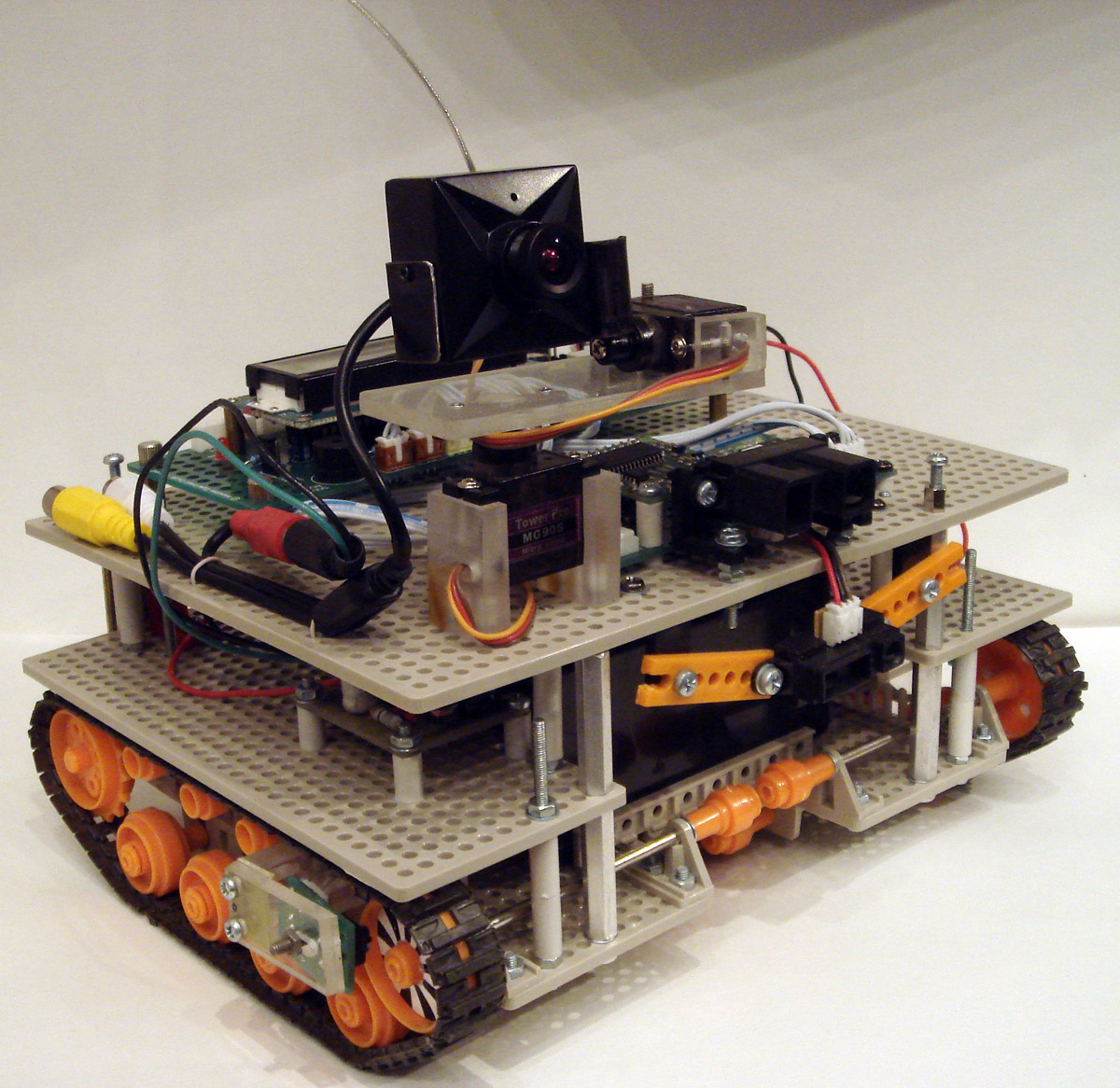
RBX-877 v2.0 - базовая плата с микроконтроллером PIC16F887 и драйвером двигателей L293D
GP2D120 - инфракрасный дальномер на 4 - 32 см
GP2Y0A02 - инфракрасный дальномер на 20 - 150 см (пока не подключен)
ZX-03 - рефлективный датчик, используется как одометр
CMPS03 - цифровой компас
ZX-Bluetooth - плата с Bluetooth модулем, используется для связи с компьютером
Беспроводная аналоговая камера с подвесом на двух сервоприводах
Прошивка была написана на языке Си в компиляторе
MikroC Pro for PIC 4.60. Отладка частично производилась в симуляторе
Proteus.
Program_RBC.zip (145кб) - проект MikroC Pro, исходные коды:
- RBC.c - основная программа
- Motor.h - процедуры управления двигателями
- cmps03.h - процедуры опроса компаса
Proteus_RBC.zip (42кб) - Файл симуляции для Proteus
Внимание! Для того, чтобы симуляция корректно заработала, в исходнике RBC.c необходимо закомментировать строчку №545
azimuth_cmps = cmps_azimuth_w(), чтобы отключить компас. Поскольку в симуляторе никакого компаса нет, то микроконтроллер зависнет на этой строчке. В архиве с файлом симуляции
.hex и
.asm файлы такие как надо, так что симуляция заработает правильно.