Эволюция конструкции робота
Август 2009
Первая версия робота была целиком собрана по прилагавшейся инструкции, фотографий не сохранилось, да и они не особенно нужны, т.к. выглядел робот точно так же, как на изображениях на коробке и в мануале. Зато сохранилось видео:
Тут управление роботом происходит с помощью инфракрасного пульта ER-4 из комплекта набора.
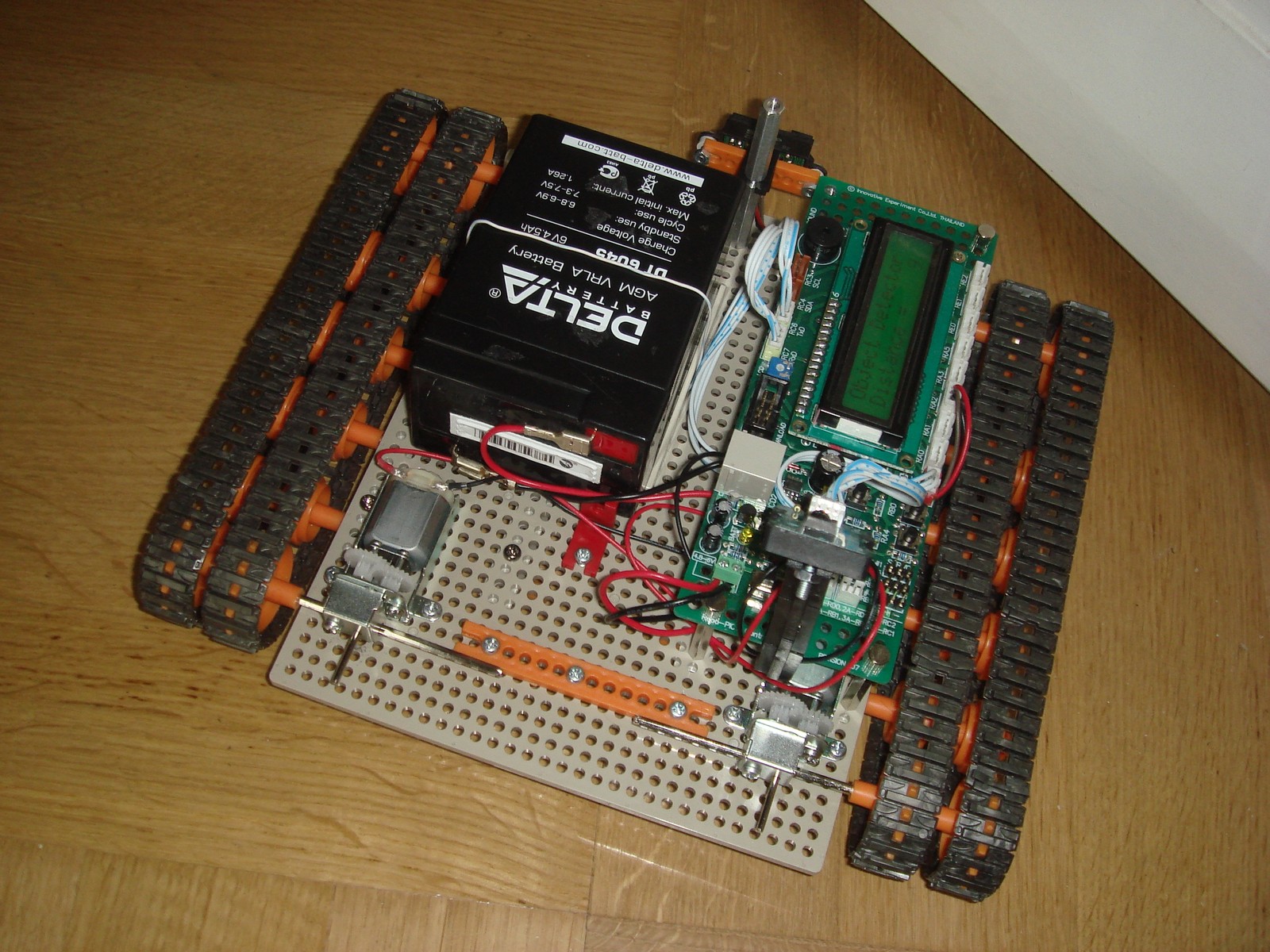
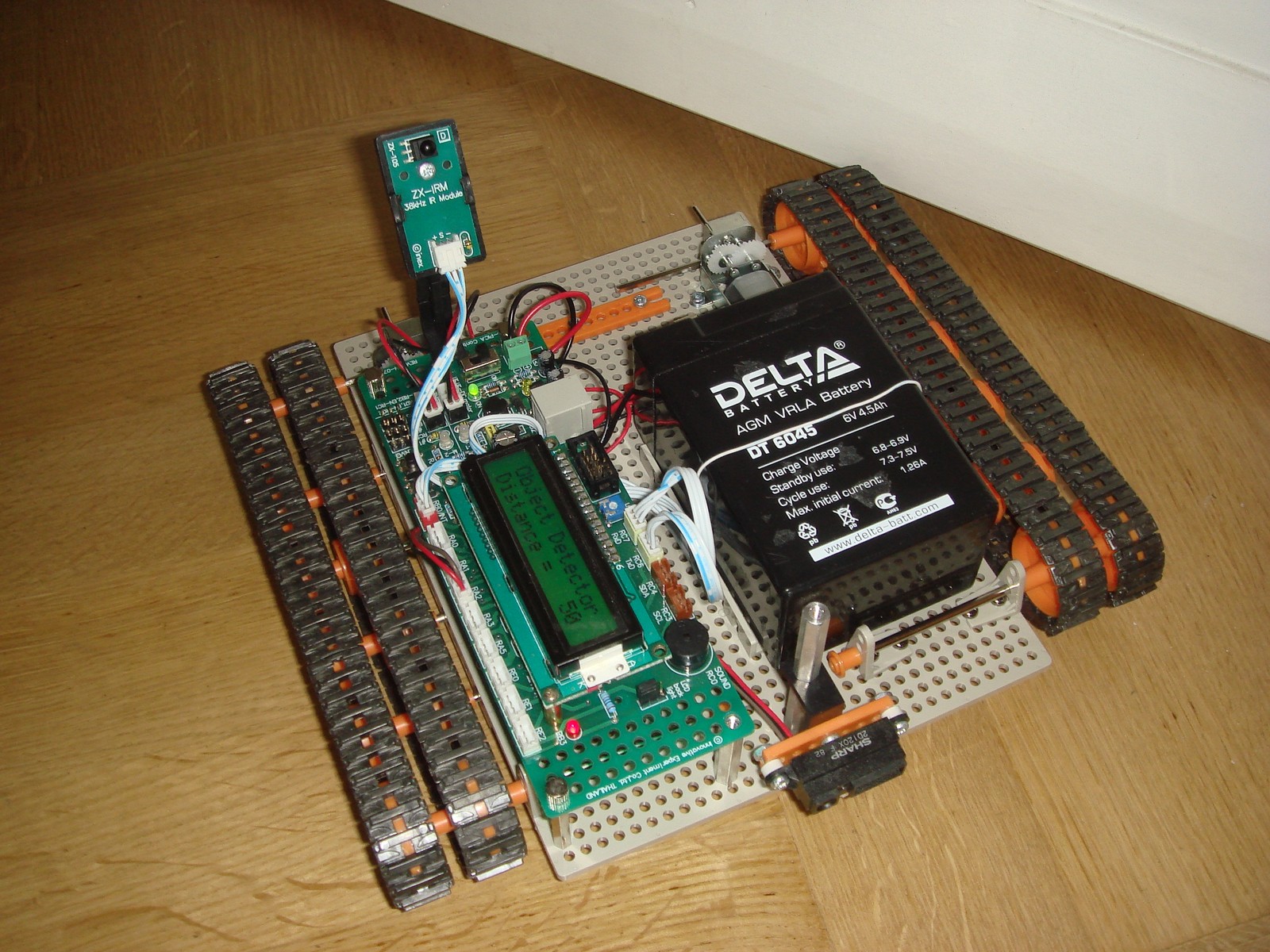
Потом была первая попытка поставить более емкую батарейку. Под руками оказался свинцовый аккум на 6 вольт (для упсов). Получилось из этого вот что:
Оно даже ездило, правда с трудом, т.к. движки в тот момент были еще комплектные, не рассчитанные на такую тяжеленную батарею. С балансировкой тоже было все плохо, робот очень часто опрокидывался.
Октябрь - ноябрь 2009
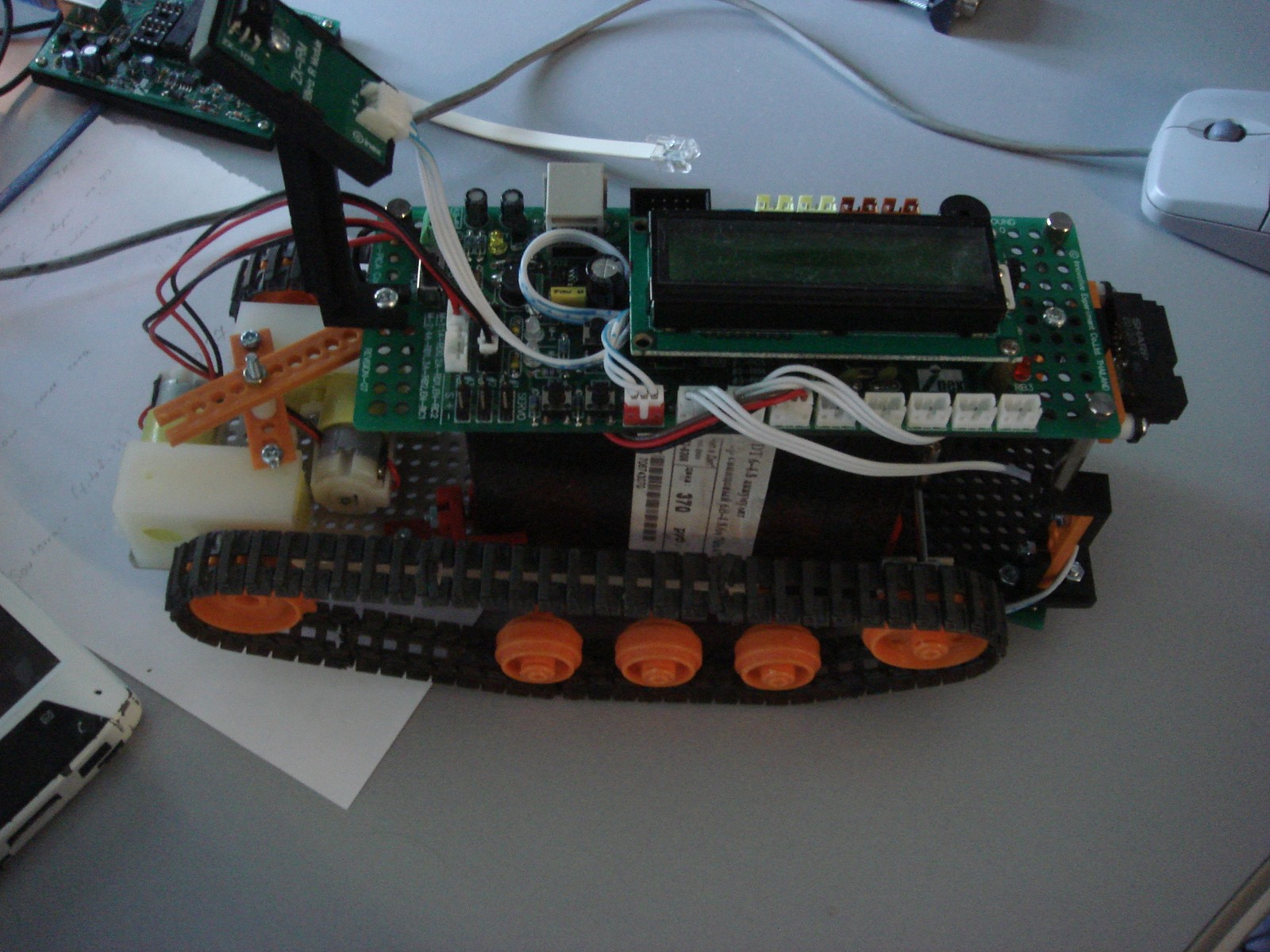
В середине сентября робот утвердился в качестве курсовой в универе. В конце октября приехала посылка из магазина
Pololu с кучей всяких деталек шасси, гусеницами и новыми движками. Сразу же было собрано шасси, очень похожее на картинку из мануала к гусеницам:
Видео с этим шасси есть на странице описания двигателей
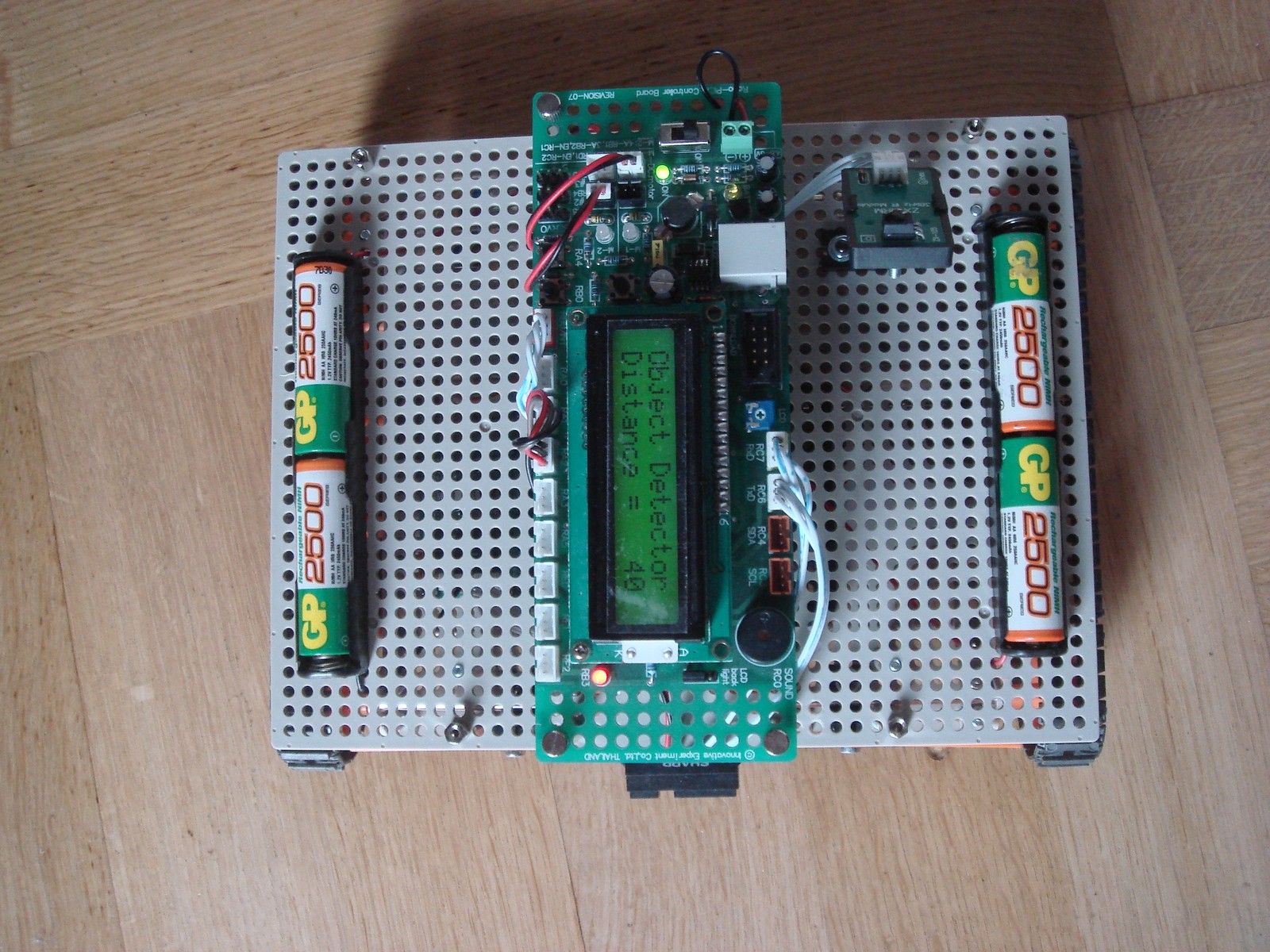
70103 Universal Gearbox. Тут робот уже "научился" более менее сносно определять препятствия с помощью инфракрасного дальномера и разворачиваться от них в сторону. Управление по инфракрасному пульту дублируется свежекупленным модулем ZX-Bluetooth (радиус дейтсвия огорчает, но всё равно он удобнее инфракрасника):
Февраль 2010
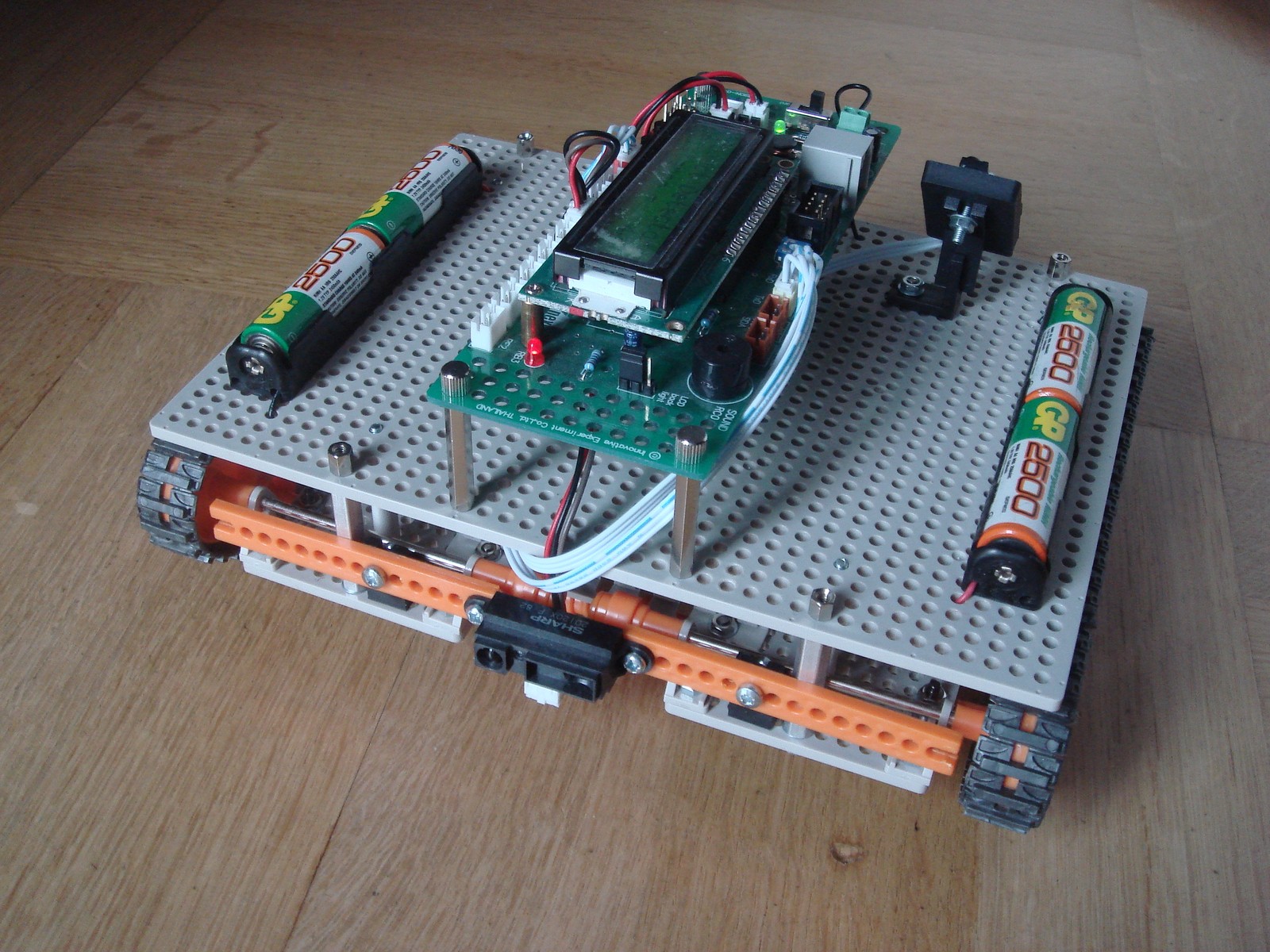
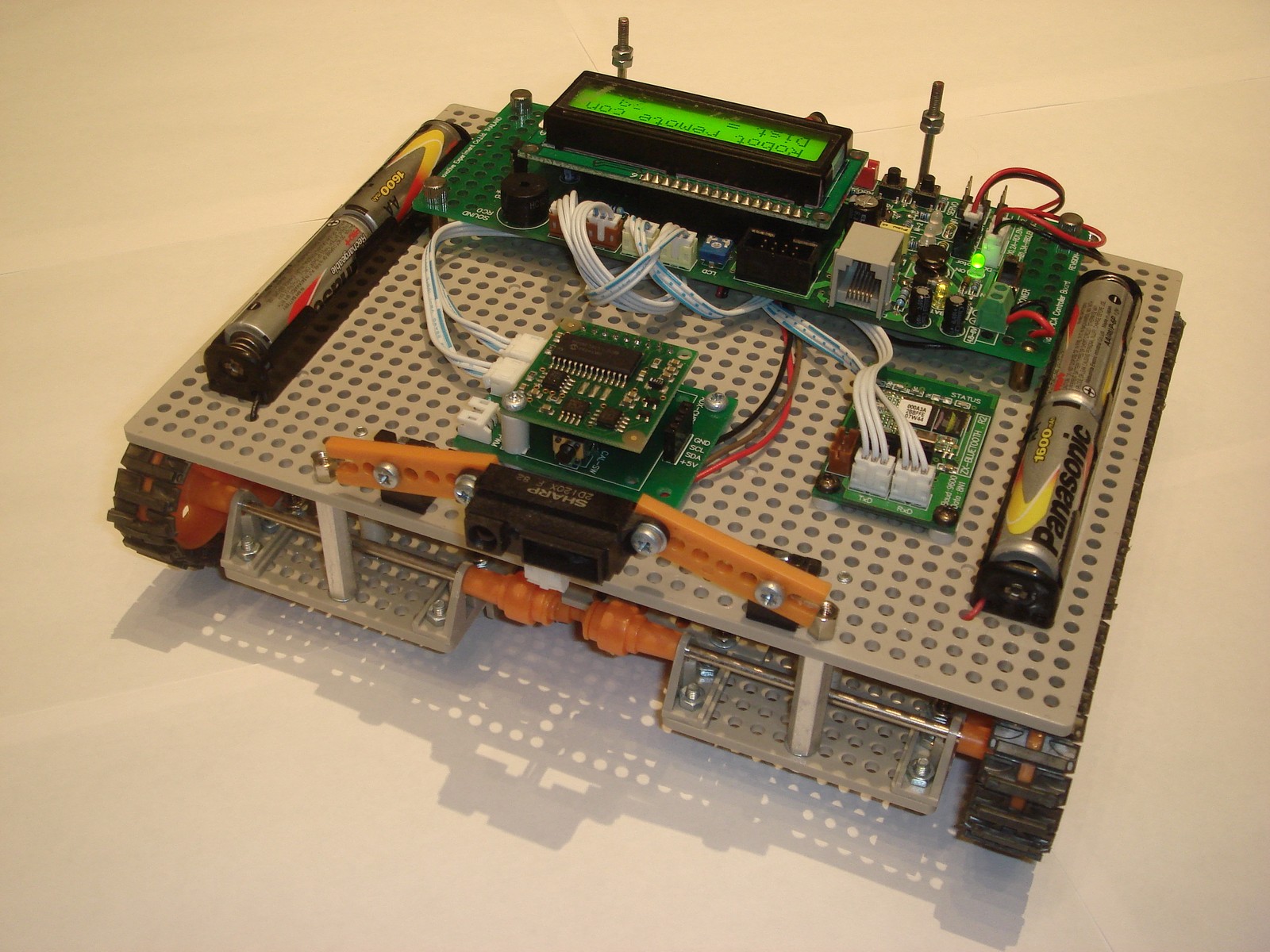
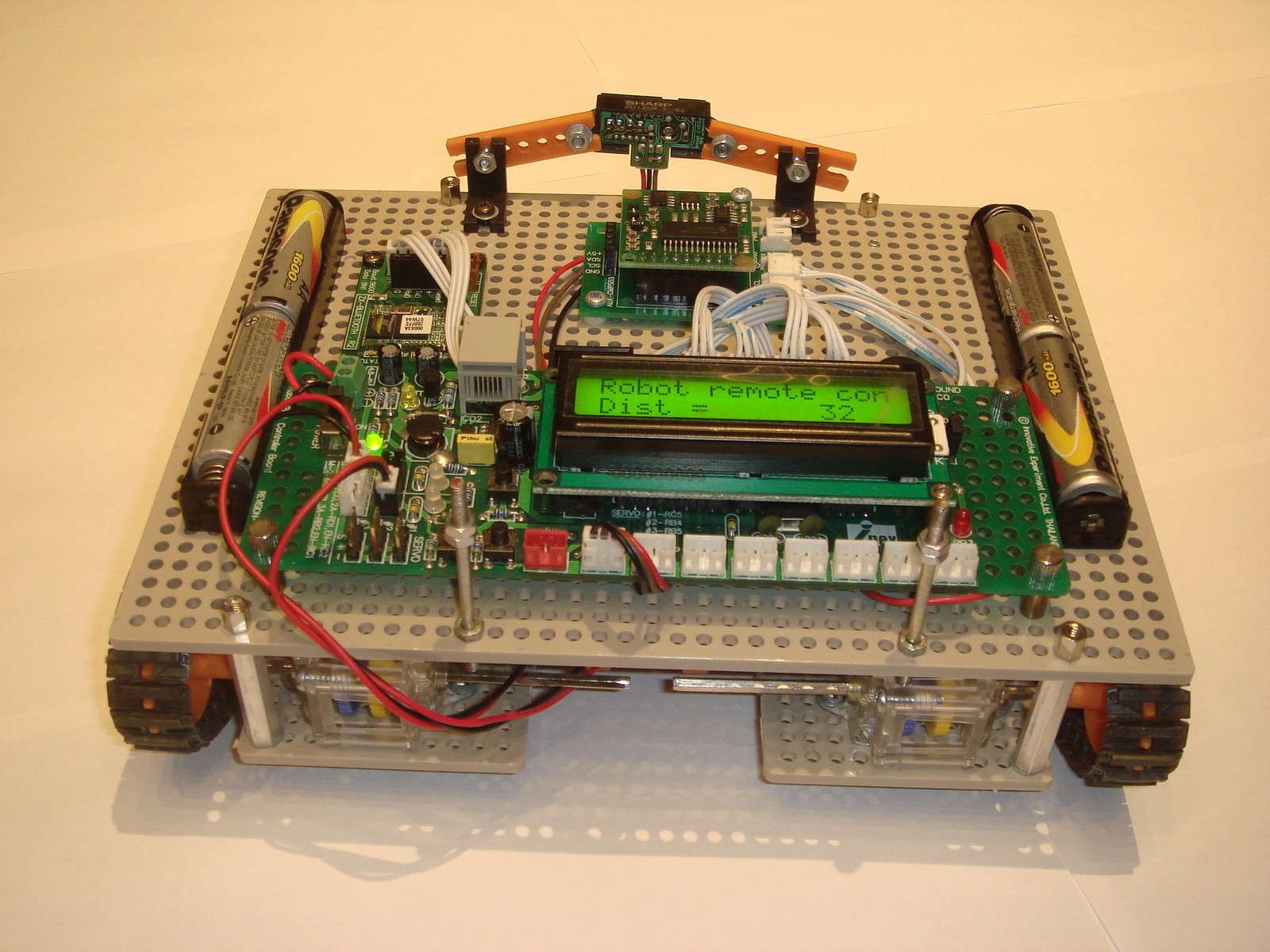
Небольшой апгрейд шасси, двигатели заменены на другие, свинцовая батарея - на 4 АА акуума, программная часть без изменений:
Видео:
Июль - август 2010
В конце июля был куплен компас CMPS03. Я ожидал от него большего, компас оказался слишком чувствительным к металлическим предметам, которые оказывались поблизости от робота во время движения, а также компас начинал врать градусов на 15 при перепаде высот. Например, на полу все показывает нормально, а на столе уже нет.
В конце августа я притащил своего робота на фестиваль
Chaos Constructions, пообщался там с представителями
Мегаэлектроники, они тоже прихватили RoboPIC'у, правда в самой базовой комплектации.
Октябрь - ноябрь 2010
Курсовая работа незаметно превратилась в диплом. Шасси опять подверглось небольшим косметичнским изменениям.
Март - апрель 2011
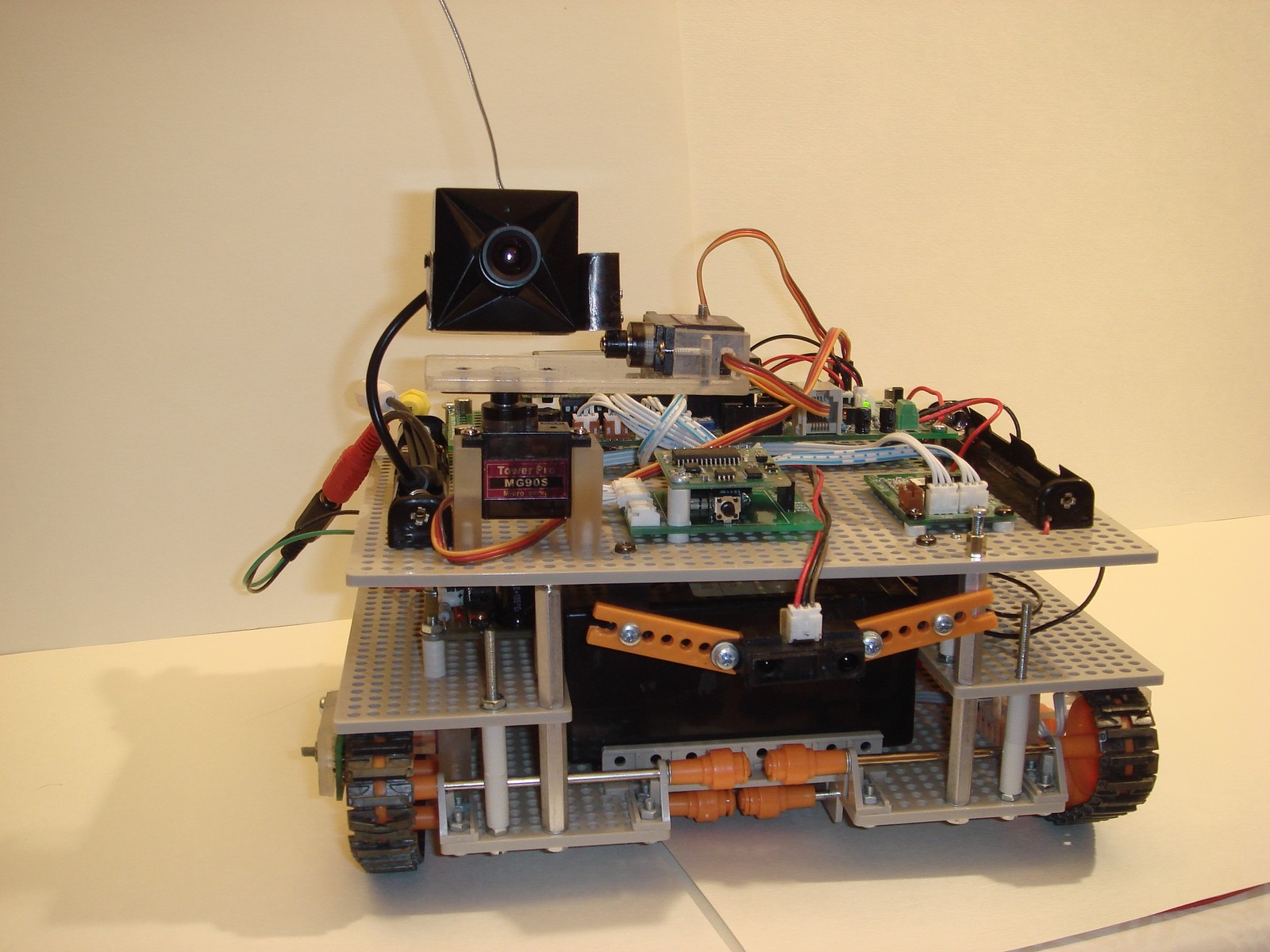
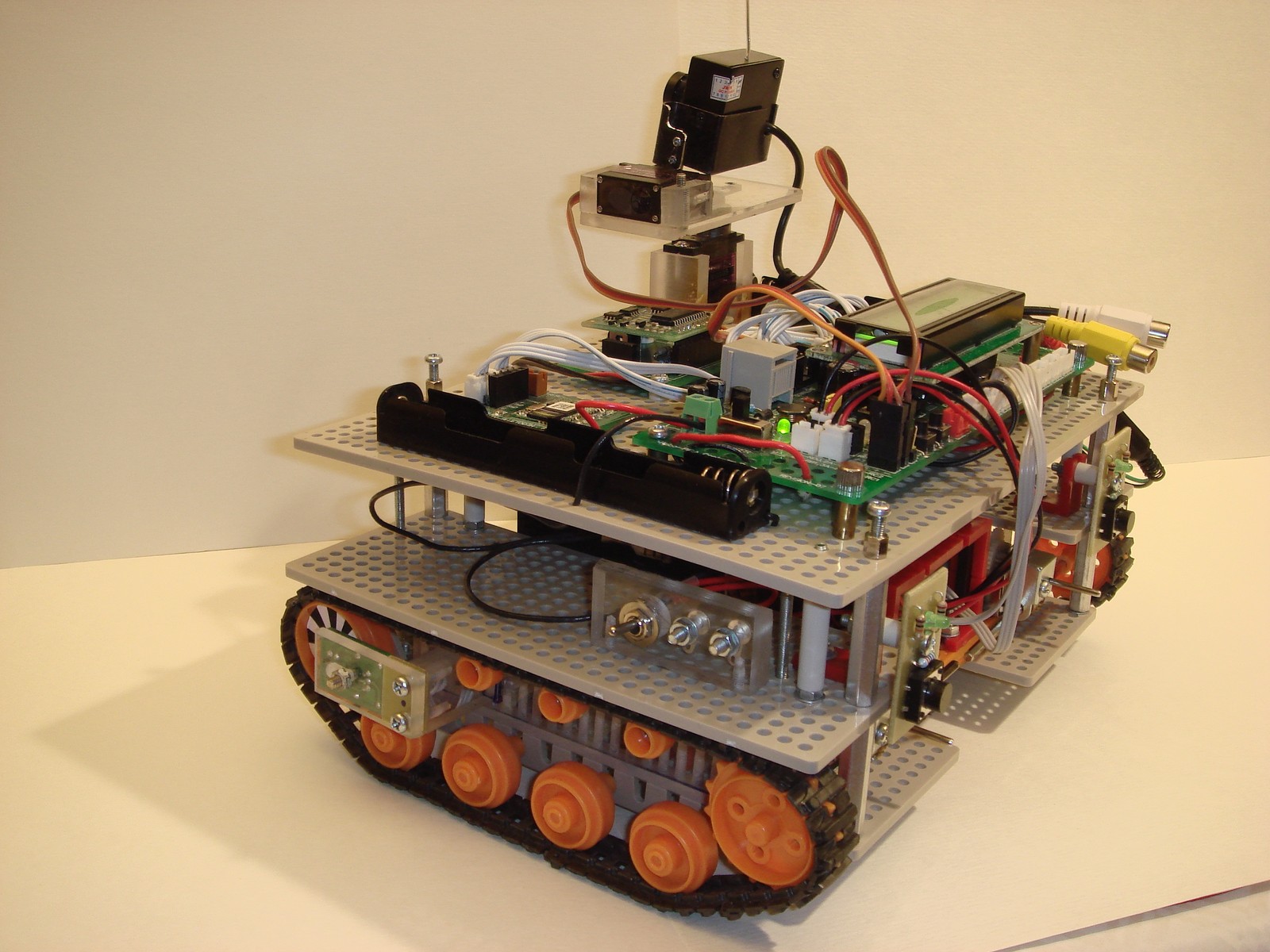
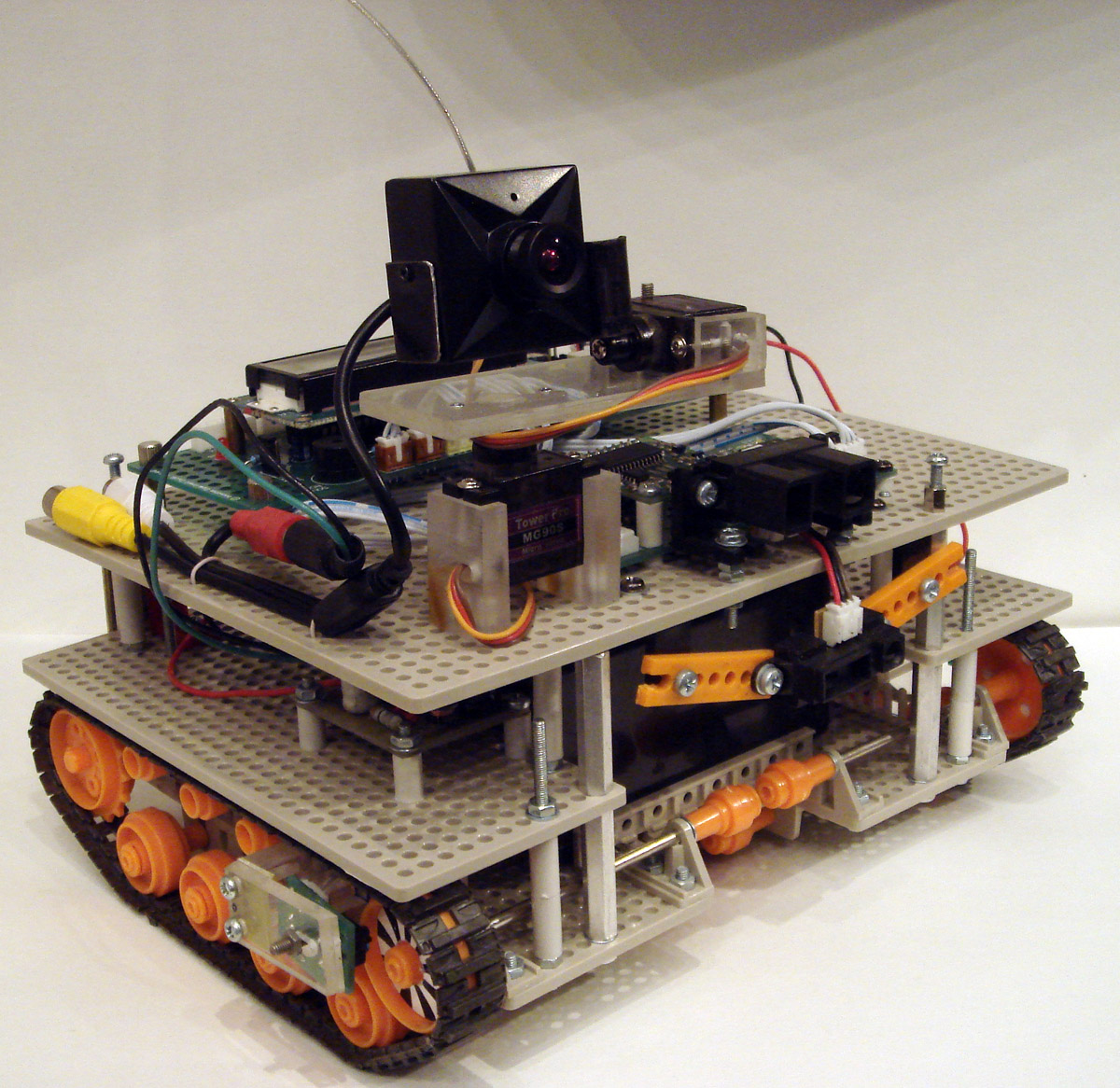
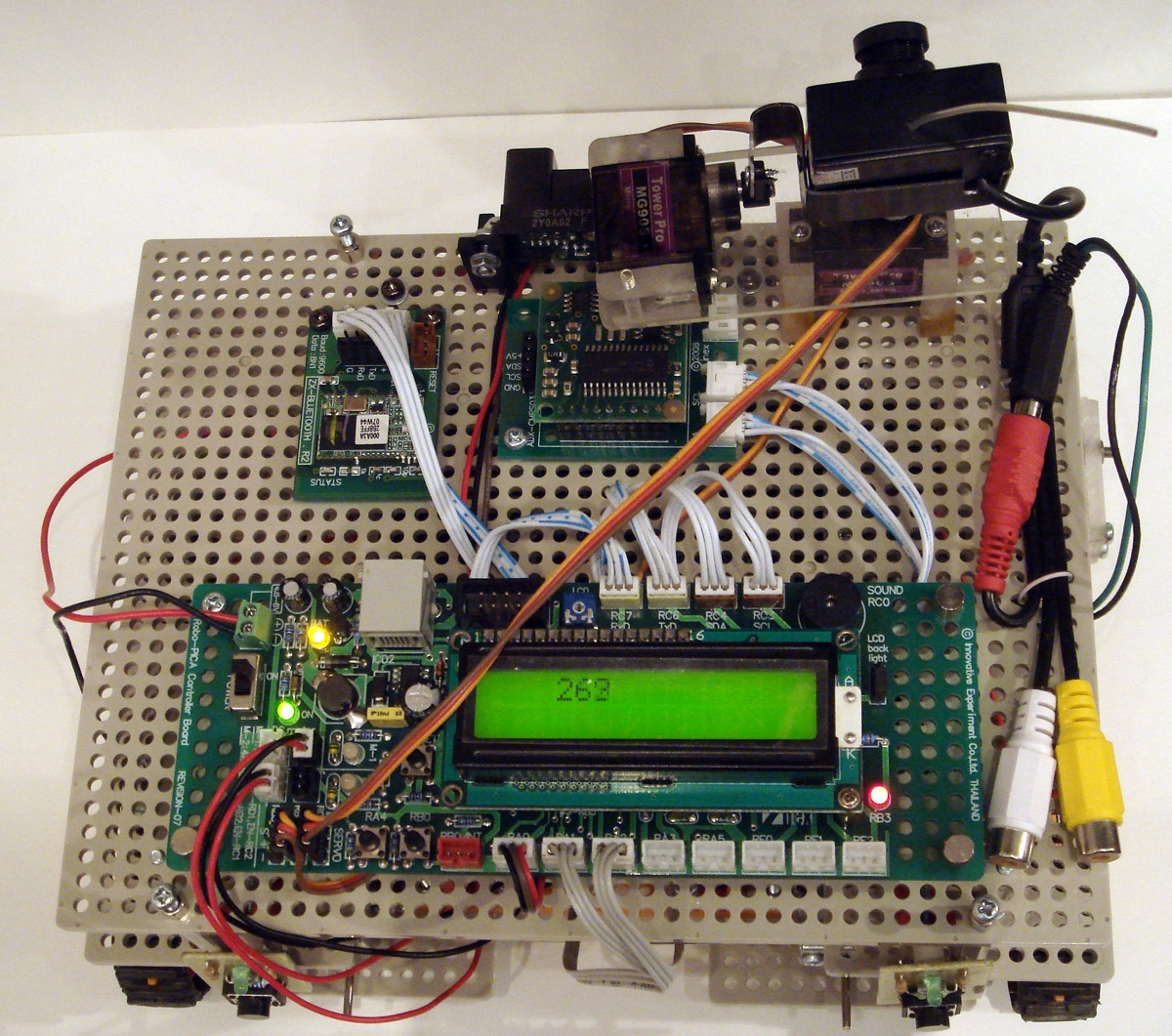
Снова изменения в конструкции шасси. Добавились датчики оборотв колес, беспроводная камера с подвесом на двух сервоприводах. Полностью переработана прошивка.
Май 2011
Финальная версия шасси.
back